製品・サービス
ロボット

BIM/CIM双方向連動自動巡回ロボットシステム
i-Con Walker®
インフラ関連業界におけるBIM/CIMを活用した生産性向上を実現するロボットシステム。

床面ひび割れ検知ロボット(手動型)
Floor Doctor Ver.3
物流倉庫、プラント、ビル、空港滑走路などの床面の目視点検を支援します。

ワイヤ吊り下げ型目視点検ロボット
Rope Stroller
橋梁床版裏面やプラント煙突など高所で広範囲な目視点検を可能にします。
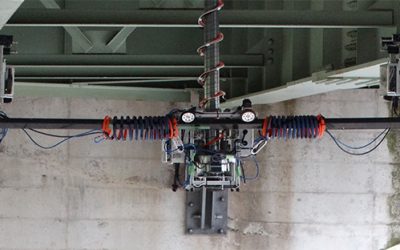
橋梁点検用下フランジ把持式 5.1軸自由度観測・記録支援装置
Turrets
橋梁の床版や上横構・ガセットなどの連結部点検を行います。

昇降ロボット & 3Dスキャナ
VAN-BO
高所から広域・高精度な点群データ・画像を取得。3Dスキャナ搭載 昇降ロボット。

マグネット式全方位点検ロボット
MagBug
スチール構造物にマグネット吸着し、背面走行、垂直壁面走行ができる全方位移動可能なロボットです。

フリッパアーム付6輪移動台車
Hex
不整地走行可能で、かつフリッパアームにより段差走破能力も持つ6輪車輪型移動台車です。

クローラ型プラント点検ロボット
Oval
工場やプラント、住宅などの点検業務が遠隔操縦で可能。各種センサ等を搭載可能です。

超遠隔地監視ロボット
ZIGZAG
超遠隔操縦が可能なため、立ち入り困難地域で活躍します。
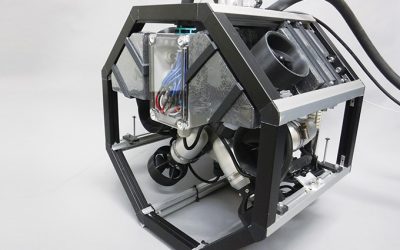
多目的点検小型潜水艦
eYe-snails
東京電力ホールディングス(株)との共同開発。水中環境下で目視点検できるロボットです。
首都高速道路(株)、(一財)首都高速道路技術センター、首都高技術(株)、首都高デジタル&デザイン(株)との共同開発
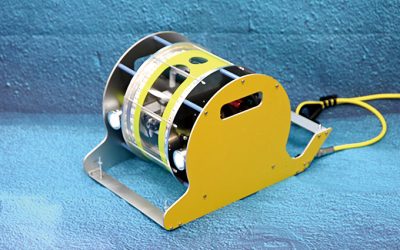
水中点検ロボット(棒付き型)
橋脚・橋台等の常時没水している構造物の画像点検に最適な水中点検ロボット。

3輪移動台車
iWs14
フィールドで駆動可能な3輪タイプの移動台車です。自律移動ロボット(SLAM等)としてご利用いただけます。

独立二輪型ロボットプラットフォーム
iWs09
研究用、実用共にご利用いただけます。各種センサ、カメラなども搭載可能です。